8.2 Sign Language and SignWriting
Sign languages, as the natural languages of the Deaf and Hard-of-Hearing communities, utilize not sound, but vision. Sound, as used in oral speech, is a wave of air pressure modulated in time to create different qualities to which we then assign meaning. These sounds are easily quantized into individual units, the phonemes, so the fundamental model of speech in linguistics and language technology is as a sequence of individual phonemes.
This simple model is then easily transferable to writing, where phonemes are represented by characters. To each individual sound, we assign a character (sometimes more), and then write these characters in order. Instead of phonemes, some languages assign characters to syllables, morphemes, or whole words, but in their fundamental, written texts are strings of characters each representing discrete sounds or sound sequences.1
In sign languages, it is not clear what the fundamental unit is, and this is quite an actual issue of linguistic research. What constitutes phonemes, syllables or even words in sign language? There is a tension in linguistics between trying to apply existing categories, developed from oral language research, and recognizing the uniqueness of sign language characteristics, but there are many examples of in-depth descriptions of different sign languages’ grammar and phonology in the literature (Branchini y Mantovan 2020; Herrero Blanco 2009; Langer et al. 2020; Liddell y Johnson 1989);
Some systems developed to write sign languages, such as that devised by (Stokoe 1960), or the Hamburg Notation System (Hanke 2004), are in their origin linguistic notation systems, but SignWriting (Sutton y Frost 2008) is a naturalistic system based on iconicity rather than linguistic categories. As such, the fundamental “unit” in SignWriting is the hand, since it is the most prominent articulator in the phonology. We will call the symbols used in SignWriting “graphemes” from now on, to highlight their nature as units of a writing system, but different from the linear “characters” of oral writing systems. We will introduce the different SignWriting graphemes in the following, to give a sense of the problem we are trying to solve, and use them to introduce the relevant parts of sign language phonology which give rise to the complexity of its writing systems.
Since hands are the most prominent and main articulator of sign languages, so hand graphemes are the most visible graphemes in SignWriting. They are iconic depictions of hands, using polygons to represent their configuration, namely the shape the palm and fingers make. The fingers can flex against the palm, extend, join laterally, curl, or even cross. The possibilities are somewhat different in each sign language, but see (Eccarius y Brentari 2008) for an analytical account and coding system for those in American Sign Language. Hand graphemes can be used to represent right or left hands, which are mirror images of each other, so the shape is horizontally flipped (reflected) to represent them when the hand grapheme is not symmetric.
As objects in three dimensional space, hands have a location and rotation which, when relevant, need to be specified.
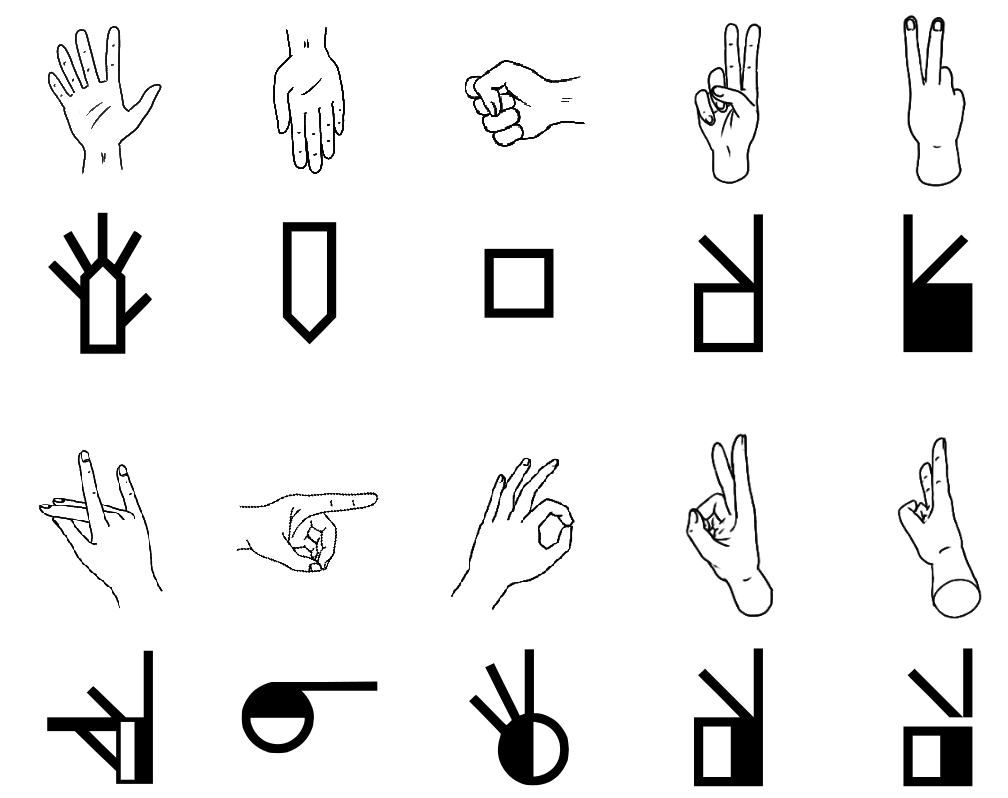
First, orientation captures the rotation of the hand in three dimensional space. The same sign, with hand rotated in different angles, can mean different things, so orientation is an essential parameter to notate. However, it is an intrinsically three-dimensional feature (see our somewhat mathematical account in Sevilla y Lahoz-Bengoechea 2019), so a number of graphical techniques are required to depict it in the flat surface that SignWriting uses, enumerated in the following and depicted in Figure 8.2.
- To project the 3D hand into a 2D plane, a plane of observation has to be determined. This can be the vertical plane (parallel to a wall in front) or the horizontal plane (parallel to the floor).
- If the chosen projective plane is the floor plane, the fingers are drawn separate to the hand, like in the last example of Figure 8.2.
- The hand grapheme can then be rotated, to iconically represent the rotation as observed from the chosen point of view.
- To indicate wrist rotation, the palm of the grapheme is filled in with different patterns according to how it would be seen from the chosen plane. If the palm is facing toward the signer, the grapheme is white, while if the back is seen, it is filled with black. If the hand is partially rotated, it is filled half white half black, with the white side indicating where the palm is.
- To improve iconicity, when the different fills are used, the positioning of the fingers in the grapheme can change, to more iconically capture the observed shape of the hand. This can mean that there is sometimes ambiguity between left and right hands, when their wrists are rotated such as the filling ends being the same.
Next, the hand has to be located in space, since a sign performed at the height of the head is not the same as the same movements performed at the chest, for example. In SignWriting, a number of graphemes exist to denote different parts of the body. These graphemes can then be placed in the page, and hand graphemes located relative to them to iconically represent their three-dimensional location. If the sign is realized in the “neutral” space (in front of the body, but not relative to any particular body part) no body graphemes need to be used, or if the head is required2, the hands are placed sufficiently distant to it to not give rise to confusion. Of course, the exact placement of hand and body graphemes is a subjective and stylistic decision, which may not often be a problem for humans but can be an obstacle for computational processing.
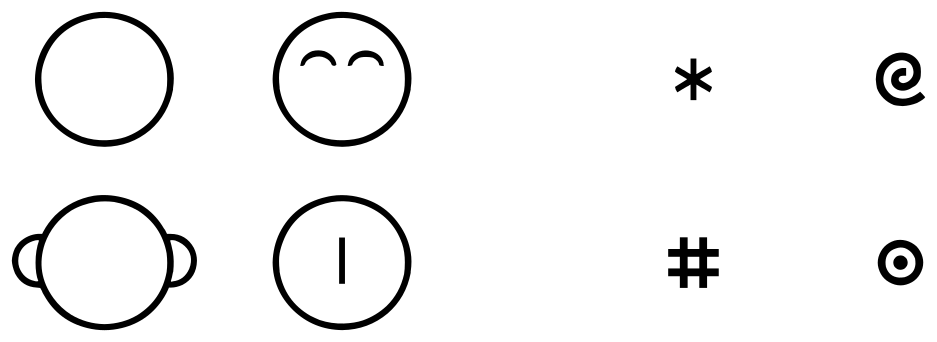
Related to location, an important feature in sign language is contact. Hands can touch, rub, brush and strike each other or different parts of the body. This is represented using small graphemes, which we call diacritics, placed in suggestive positions near the point of contact. These are the main diacritics, but we also group under this umbrella other small, independent graphemes which capture things like movement dynamics, pauses, or internal hand movements. Internal hand movements capture an evolution of the hand shape in the sign, such as fingers being bent, extended, or wiggling. Some examples of heads and diacritics can be seen in Figure 8.3.
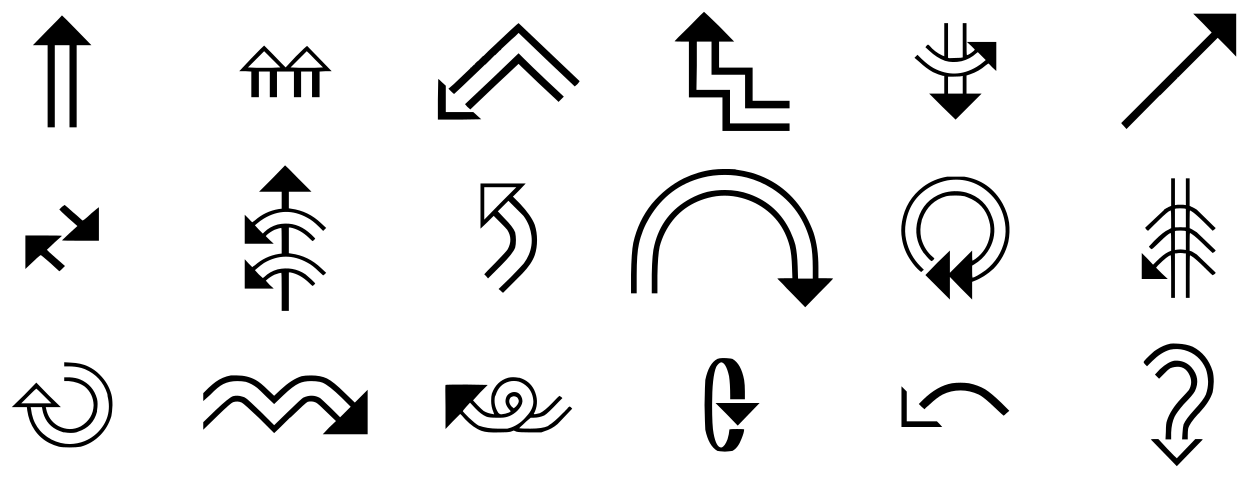
Lastly, hands are often not static, but rather move in space, and these movements can have meaning in themselves. In SignWriting, movements are represented with arrows, which can have a start and an end, and depict a straight, curved, or more complicated trajectory between those points. Movements can also be circular, naturally represented with a closed circular trajectory. To represent three dimensional movements in the flat page, the same observation planes used for hand orientation are required. When the movement occurs in the plane parallel to the floor, single-stemmed arrows are used, while double-stemmed arrows represent movements in the vertical plane. Additionally, the arrow heads can be black, if the right hand is moving, filled with white, if it is the left hand moving, or left open, when both hands move together as a unit. Movements can get very complicated, and some examples are presented in Figure 8.4.
These are not all of the possibilities of SignWriting, and even within the described graphemes there is complexity that is out of scope for this article. This introduction should be enough to understand the complexity of the problem in hand, and the reasons for our proposed solution. Nonetheless, a complete textbook by the inventor can be found in Sutton (1995), or online at https://www.signwriting.org/.